|
|
 Rank: Master      Groups: Registered
Joined: 07/07/2015 Posts: 1,292 Points: 3,928 Location: Allentown PA
|
Looking good.
DeAgostini kit builds:
Millennium Falcon: 18% Complete
Shelby GT-500: 28% Complete
Thunderbird 2: 13.75% Complete
|
|
|
 Rank: Amateur level 2  Groups: Registered
Joined: 15/03/2017 Posts: 46 Points: 138 Location: Outer reaches of the galaxy .... West Midlands
|
|
|
|
Rank: Administration     Groups: Registered, Administrators, Global Forum Support, Moderator, Forum Support Team, Official Builds Joined: 04/01/2016 Posts: 7,178 Points: 21,841 Location: Northamptonshire, England
|
Excellent work Chip, great job. Just goes to show what can be done with a few greeblies.  Mark Regards
Markwarren
(Mark) Admin
|
|
|
Rank: Amateur level 2 Groups: Registered
Joined: 15/03/2017 Posts: 46 Points: 138 Location: Outer reaches of the galaxy .... West Midlands
|
More pilfered/kindly donated Lego used on pit No 2  Made some I-beams to support the gratings. Decided to leave both pits covers loose so I can place or remove as I like: The EL wire I got doesn't really do the trick, think I will get some EL Tape for the final effect.  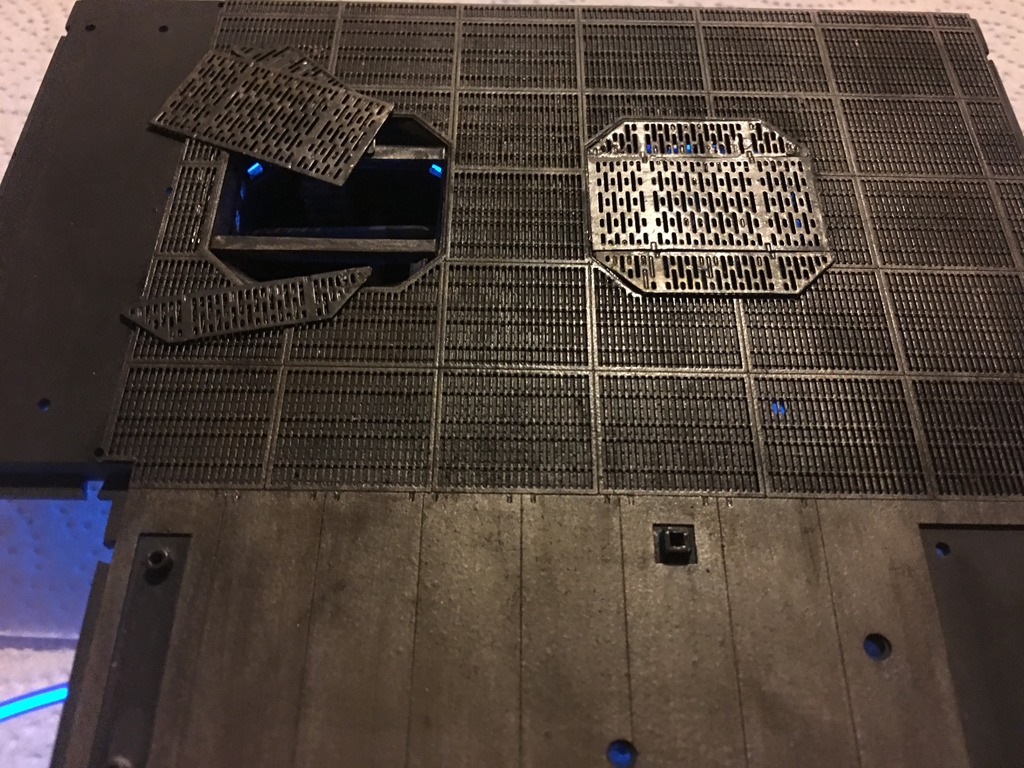 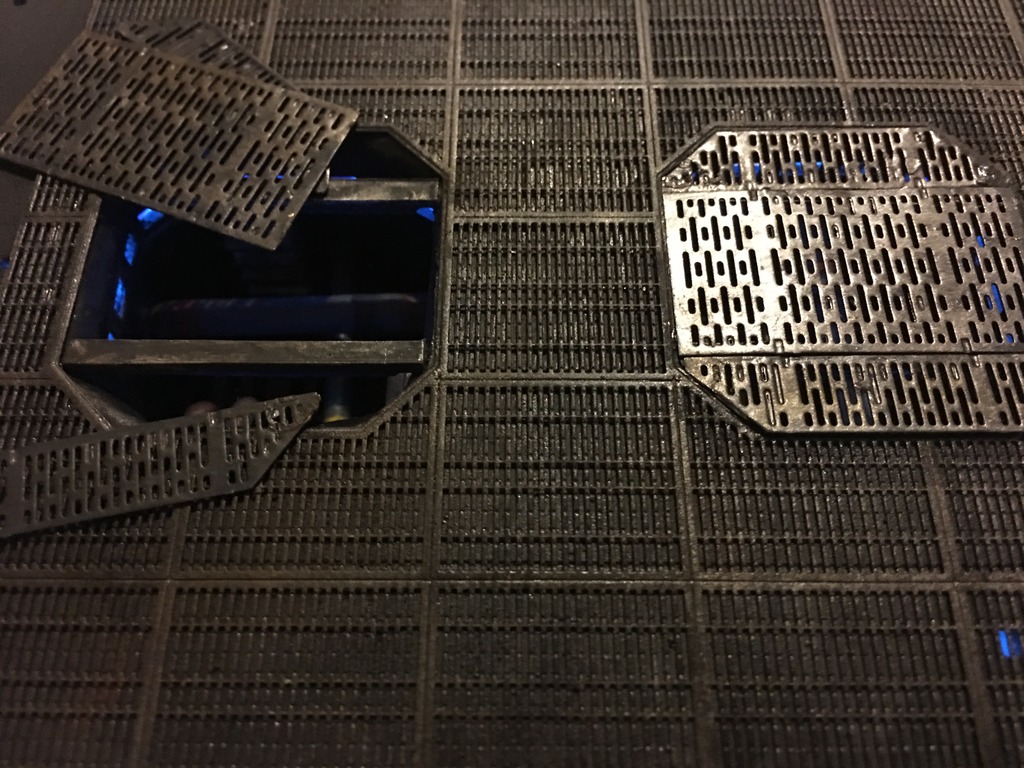 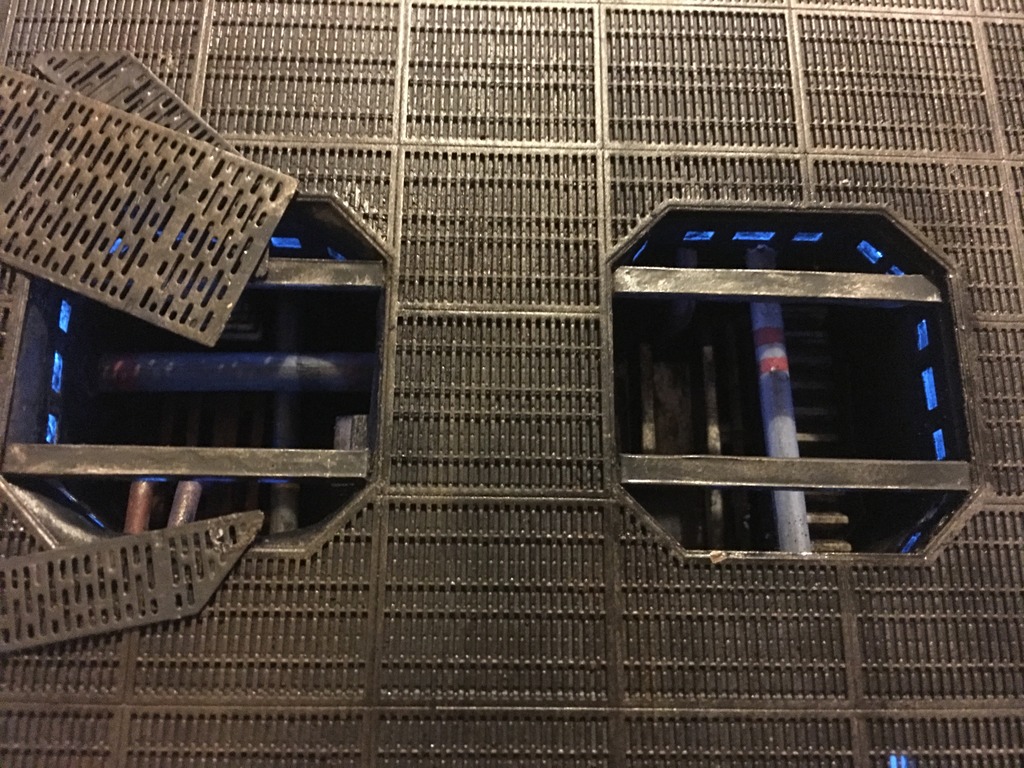
|
|
|
|
|
Now that does look great, lovely work.....  Regards Alan
|
|
|
Rank: Amateur level 2 Groups: Registered
Joined: 15/03/2017 Posts: 46 Points: 138 Location: Outer reaches of the galaxy .... West Midlands
|
With the floor modded I have turned my attention to the walls of the hold, again trying to stay away from too many shapeways extras I decided to add some of the extra detailing with some old spare ABS I have.  Marking up the areas I set about drilling and filing:  And then cut some ABS strips and cemented in place:  A bit more sanding and some primer next to highlight any further sanding requirements before I start adding any finer details.
|
|
|
Rank: Amateur level 2 Groups: Registered
Joined: 15/03/2017 Posts: 46 Points: 138 Location: Outer reaches of the galaxy .... West Midlands
|
|
|
|
Rank: Administration Groups: Registered, Administrators, Global Forum Support, Moderator, Forum Support Team, Official Builds Joined: 04/01/2016 Posts: 7,178 Points: 21,841 Location: Northamptonshire, England
|
Coming on very nicely, some nice additions to the standard kit. Keep up the good work. Regards Mark Is that an Ewok!!!!!  Regards
Markwarren
(Mark) Admin
|
|
|
|
|
Looking good and nice work  Current builds:-C57,Zero, Lamborghini Countach, Caldercraft HMS Agamemnon,Robi,R2-D2, MFH Cobra .
|
|
|
Rank: Master Groups: Registered
Joined: 07/07/2015 Posts: 1,292 Points: 3,928 Location: Allentown PA
|
Nice progress. Mine has slowed down to a crawl because of renovations and we acquired a new puppy as well.
DeAgostini kit builds:
Millennium Falcon: 18% Complete
Shelby GT-500: 28% Complete
Thunderbird 2: 13.75% Complete
|
|
|
|
|
Looks great, very nice work.... Regards Alan
|
|
|
Rank: Amateur level 2 Groups: Registered
Joined: 15/03/2017 Posts: 46 Points: 138 Location: Outer reaches of the galaxy .... West Midlands
|
Thanks all, at this rate I should be finished for Episode 24 lol Metal Mech wrote:Nice progress. Mine has slowed down to a crawl because of renovations and we acquired a new puppy as well. What have you got MM? Everything we've read on Tibetan Terriers they are fantastic dogs but terrible pups hence the moving of all my stuff out of the way.
|
|
|
Rank: Amateur level 2 Groups: Registered
Joined: 15/03/2017 Posts: 46 Points: 138 Location: Outer reaches of the galaxy .... West Midlands
|
Been a while since my last post, just over a month in fact, wish I had a lot to show for that time but Tilly (the pup) is taking up an inordinate amount of what spare time I do have (as well as a lot of skin from my hands, calfs and ankles lol) Relegated to the box room I decided to make it more conducive to modelling so splashed out on a new table and some Hobbyzone paint racks/draws etc:  No excuse for not knuckling down to it now. I did make some progress on hold Lighting elements, I added a bunk light from 2x 3mm leds, and added fibre optics to my holoboard and hold computer: 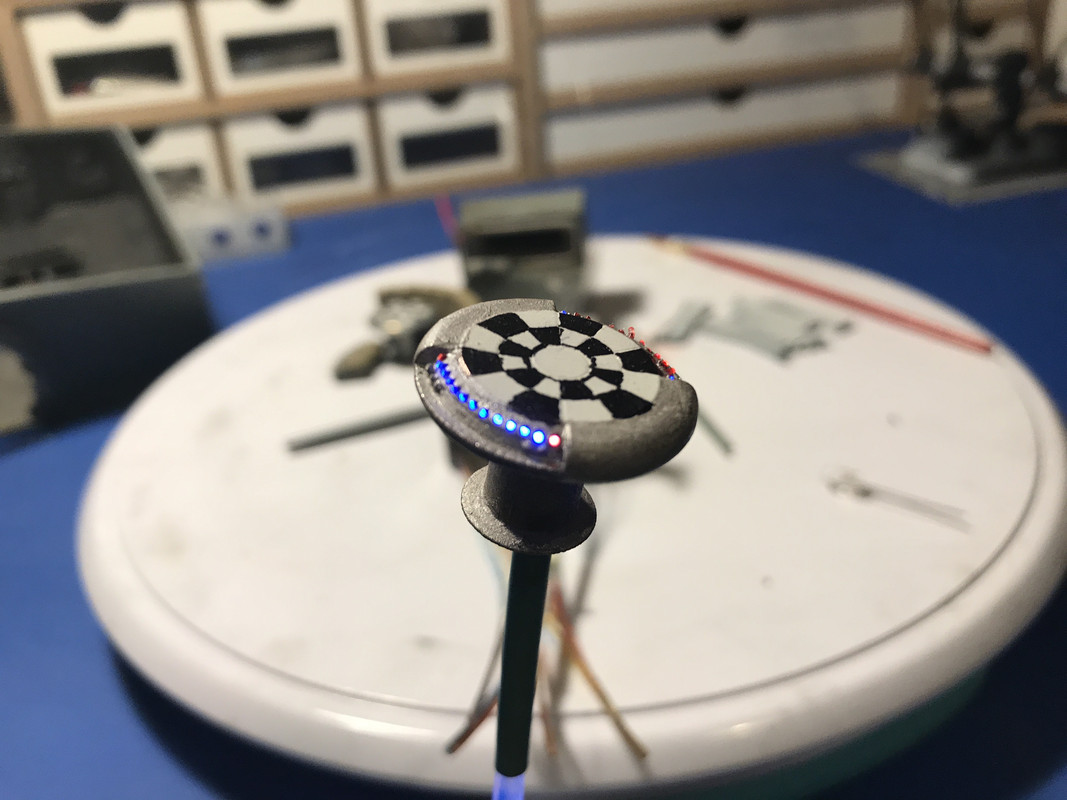 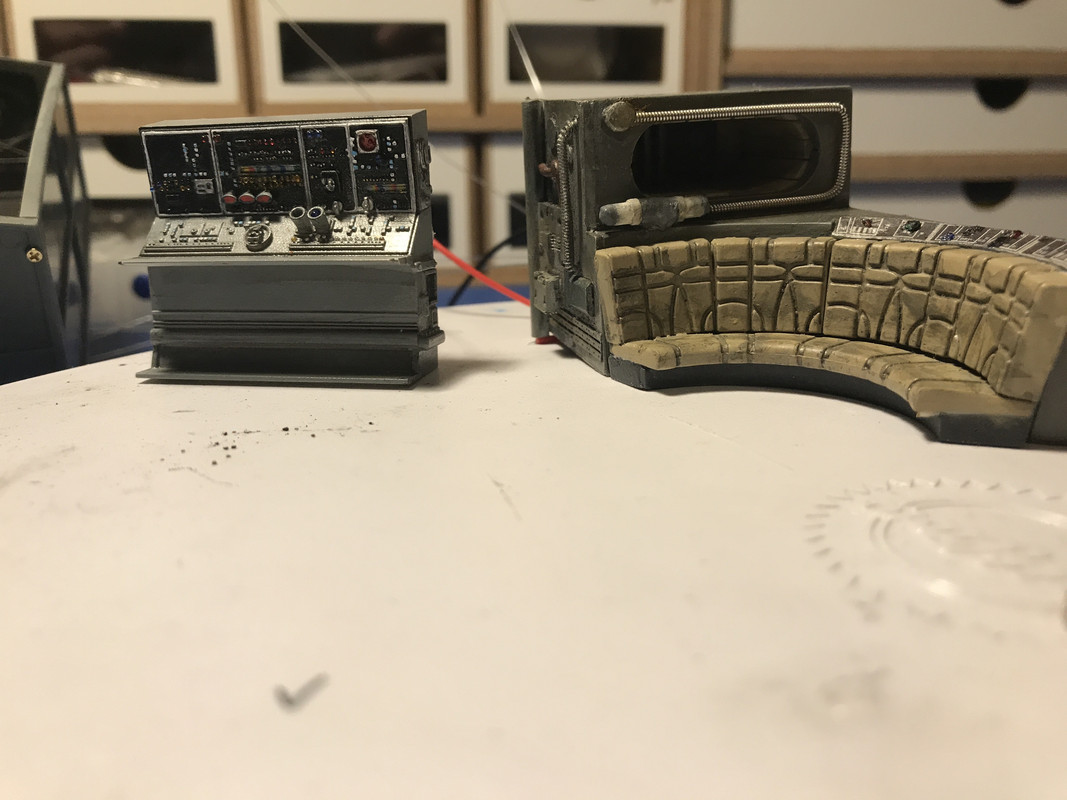 I intend to use white leds for all my fibre optics and colour the fibres instead therefore reducing the overall amount of leds. 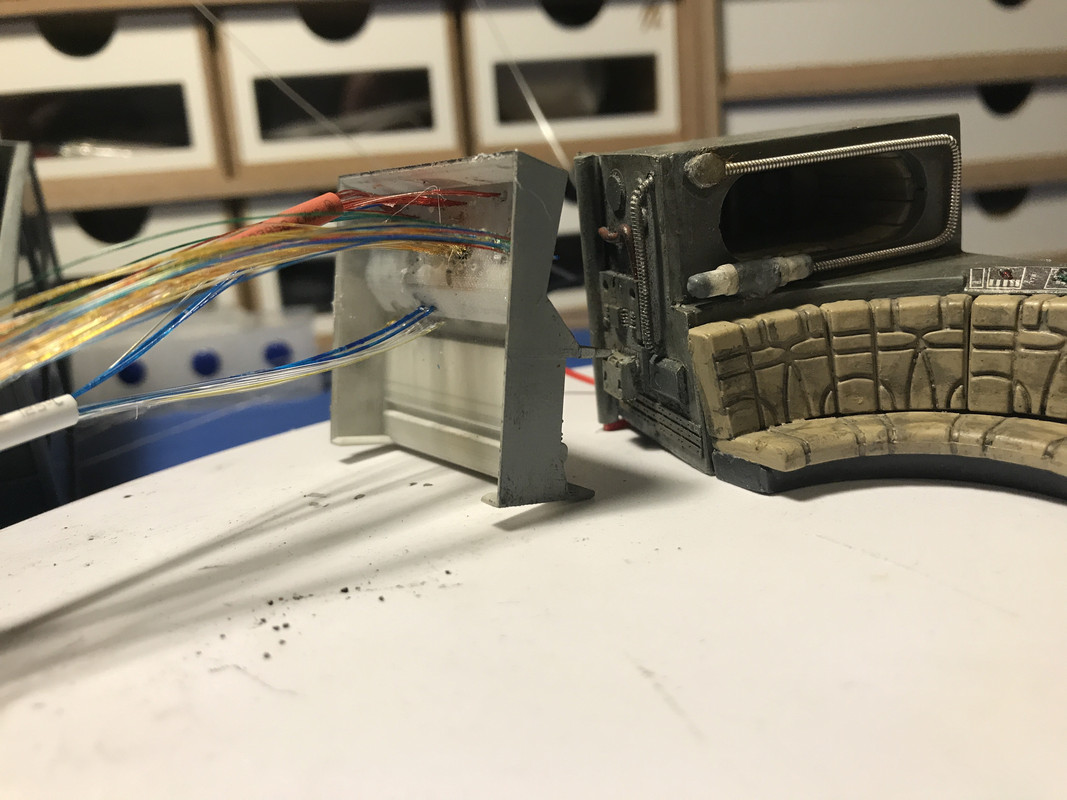 Before I go any further I really need to sort out my electronics, my previous program had various issues with ancillary functions affecting the engine running etc and I wasn't happy using an IR remote and receiver so I have been working with wifi through the Blynk app, not 100% finished but almost... just a few quirks to iron out. I intend to use a 12v supply with a 5v regulator chip for some discrete lines and powering the arduino and a buffer chip for the 12v lines. Please excuse the poor video quality, was a bit of a rush in between puppy attacks: https://youtu.be/hXI6-uhh7kE
|
|
|
Rank: Administration Groups: Registered, Administrators, Global Forum Support, Moderator, Forum Support Team, Official Builds Joined: 04/01/2016 Posts: 7,178 Points: 21,841 Location: Northamptonshire, England
|
Excellent work chip, love your new work station. The engine lighting with sound effects is amazing. Clever work.  Mark Regards
Markwarren
(Mark) Admin
|
|
|
Rank: Amateur level 2 Groups: Registered
Joined: 15/03/2017 Posts: 46 Points: 138 Location: Outer reaches of the galaxy .... West Midlands
|
Markwarren wrote:Excellent work chip, love your new work station. The engine lighting with sound effects is amazing. Clever work. Mark Thanks Mark, I'll share the coding on here once I've ironed out those quirks if anyone is working on a similar set up or can offer some streamlining for it. Chip
|
|
|
Rank: Amateur level 2 Groups: Registered
Joined: 15/03/2017 Posts: 46 Points: 138 Location: Outer reaches of the galaxy .... West Midlands
|
For anyone interested my code for my Arduino Mega control using the Blynk app for iPhone or Android is enclosed. I have set up the Blynk controls as the following virtual pins: V0 - Terminal Read Out V1 - Volume Slider (values 0 to 30) V2 - Ramp (Step control 0 to 1, send step OFF, loop values OFF) V3 - LED (for ramp up) V4 - LED (for ramp down) V6 - Cockpit Power Switch V7 - Engines Switch V8 - Hyperdrive Switch V9 - Cannons Switch V10 - Headlights Switch V11 - Hold Lighting Switch V12 - Landing Lights V13 - Anti-Col Lights V14 - Random Audio Switch V16 - Music (Step control 0 to 14, send step OFF, loop values OFF) V17 \ V18 \ LED (for Rdy indication, 4 because I hated seeing blank space) ;~) V19 / V20 / 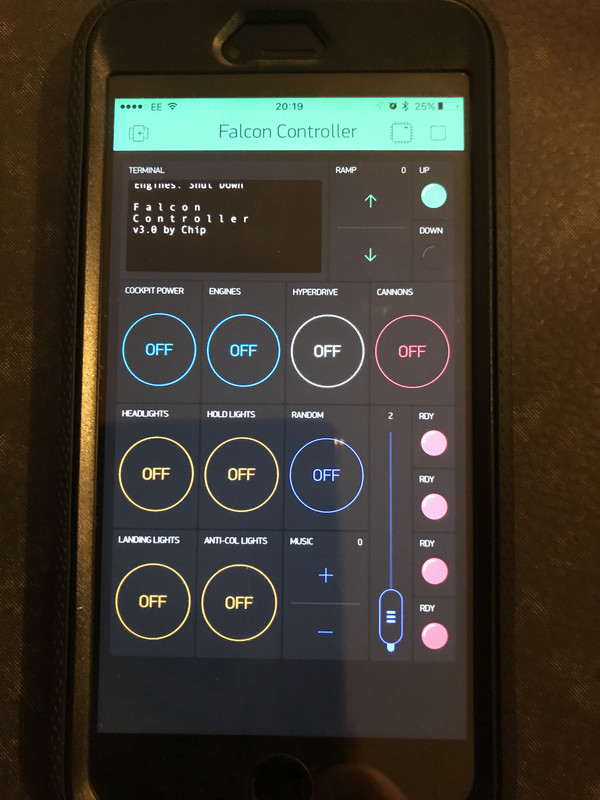 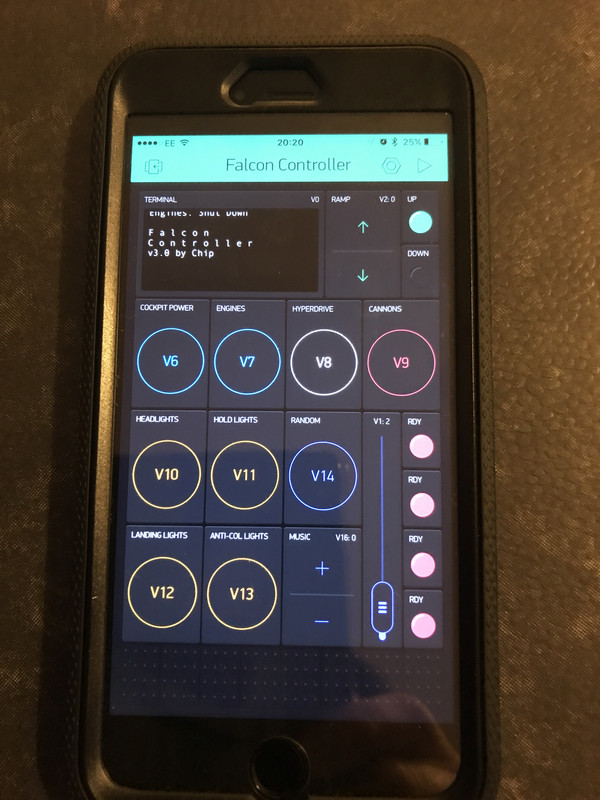 .... moved to next post
|
|
|
Rank: Amateur level 2 Groups: Registered
Joined: 15/03/2017 Posts: 46 Points: 138 Location: Outer reaches of the galaxy .... West Midlands
|
Code Within:
Code:
//#define BLYNK_DEBUG // Optional, this enables lots of prints
//#define BLYNK_PRINT Serial
//
// DeAGOSTINI Millennium Falcon Light & Sound Control V3.0
//
// for Arduino Mega/Mega2560
#include <BlynkSimpleShieldEsp8266.h>
#include <SoftwareSerial.h>
#include <DFPlayer_Mini_Mp3.h>
#include <DFRobotDFPlayerMini.h>
#include <FastLED.h>
BlynkTimer timer;
#define Ready_LED 51
#define NoMusicFiles 14
#define RandomLEDs 4 // Length of flash LED data Array
#define StartPIN 28 // LED Pin 28 - 33
#define LED_Red "#D3435C"
#define LED_Green "#23C48E"
WidgetTerminal terminal(V0);
WidgetLED RampLEDup(V3);
WidgetLED RampLEDdown(V4);
WidgetLED Rdy1LED(V17);
WidgetLED Rdy2LED(V18);
WidgetLED Rdy3LED(V19);
WidgetLED Rdy4LED(V20);
char auth[] = "blynk auto code";
char ssid[] = "Your SSID";
char pass[] = "Password";
#define ESP8266_Serial Serial3 // Hardware Serial to ESP8266
long int ESP8266_BAUD = 115200;
ESP8266 wifi(&ESP8266_Serial);
//--- DC Motor ---------------------------------------------------
const int buttonON = LOW; // When the button is pressed, the value of the pin is LOW
const int buttonOFF = HIGH; // When the button is pressed, the value of the pin is HIGH
const int DC_1A = 5; // DC motor 1 pin A
const int DC_1B = 6; // DC motor 1 pin B
const int SW_1A = 7; // DC motor 1 stop switch 1 pin 1
const int SW_1B = 8; // DC motor 1 stop switch 1 pin 2
int DC_RO = 0; // DC motor 1 rotation direction
boolean DC_state1; // DC motor 1 stop switch 1
boolean DC_state2; // DC motor 1 stop switch 2
boolean EngineRunFlag; // Engines running flag
boolean HyperdriveFlag; // Hyperdrive engaged flag
boolean RdyFlag = true;
boolean rampdownflag = false;
boolean rampupflag = false;
boolean cannonFlag = false;
boolean chatterFlag = false;
boolean audioflag = false;
const int NeopixelPin = 9; // the number of the neopixel strips pin
const int NUMPIXELS = 45; // Number of pixels in the strip
CRGB LED_Array[NUMPIXELS];
// -------------------------------------------- DATA ARRAYS ------------------------------------------------------
//
// REFERENCE: 0 1 2 3
// PIN: 28 29 30 31
boolean SW_LED[RandomLEDs] = { 0, 0, 0, 0}; // LED lighting switch
int SW_VAL1[RandomLEDs] = {300, 200, 100, 5}; // LED lighting time (0: constant light)
int SW_VAL2[RandomLEDs] = {300, 200, 100, 1}; // LED off time
int SW_RAN1[RandomLEDs] = { 30, 30, 30, 3}; // LED random lighting time
int SW_RAN2[RandomLEDs] = { 30, 30, 30, 5}; // LED random turn off time
int SW_On[RandomLEDs] = {}; // LED ON (0: OFF while 1: ON)
int SW_CNT[RandomLEDs] = {}; // LED counter
int MusicID[NoMusicFiles] = {0, 1, 2, 36, 37, 38, 39, 40, 41, 42, 43, 44, 45, 46};
String MusicName[NoMusicFiles] = {"", "Main Title - The Ice Planet Hoth", "ANH - The Throne Room", "The Imperial March", "Across The Stars", "Duel Of The Fates", "The Falcon", "Bounty Hunters Pursuit", "Mos Eisley Spaceport", "Cantina Band", "City In The Clouds", "Emperors Throne Room", "I Can Fly Anything", "Battle Of The Heroes"};
// -- MP3 Variables ----------------------------------------------------------------------------------------
DFRobotDFPlayerMini myDFPlayer;
#define Busy_PIN 2 //Busy PIN
#define MP3_CFolder 240 //Folder specification command
#define MP3_CPlay 236 //Play command
#define MP3_CStop 239 //Stop command
#define MP3_CVol 200 //Volume command
int MP3_Folder = 1; //MP3 folder
int MP3_No = 1; //MP3 audio number
int MP3_Vol = 15; //MP3 volume
int GunVoice = 0; //Laser cannon
int TrVoice = 0; //Luke training
int EnVoice = 0; //Engine startup
int MusicST = 0; //Music playback
int pinValueV1 = 0;
int pinValueV2 = 0;
int pinValueV3 = 0;
int pinValueV6 = 0;
int pinValueV7 = 0;
int pinValueV8 = 0;
int pinValueV9 = 0;
int pinValueV10 = 0;
int pinValueV11 = 0;
int pinValueV12 = 0;
int pinValueV13 = 0;
int pinValueV14 = 0;
int pinValueV15 = 0;
int pinValueV16 = 0;
int pinValueV17 = 0;
int pinValueV18 = 0;
int PixelRan1 = 0;
int PixelRan2 = 0;
int PixelRan3 = 0;
int PixelRan4 = 0;
int PixelRan5 = 0;
int PrevPixelRan1 = 20;
int PrevPixelRan2 = 20;
int PrevPixelRan3 = 20;
int PrevPixelRan4 = 20;
int PrevPixelRan5 = 20;
int randomChatter;
int cannonCount = 0;
int rampTimer;
int hyperdriveTimer;
int cannonTimer;
int chatterTimer;
bool initialisationpass = true;
// ------------------------------------------------------------------------------------------------------------ //
// ------------------------------------------ Blynk Widget Sub-routines --------------------------------------- //
// ------------------------------------------------------------------------------------------------------------ //
BLYNK_WRITE(V1)
{
if (RdyFlag == true)
{
RdyFlagStateChange();
pinValueV1 = param.asInt(); // assigning incoming value from pin V1 to a variable
mp3_set_volume(pinValueV1);
terminal.print("Volume: ");
terminal.println(pinValueV1);
terminal.println("");
terminal.flush();
RdyFlagStateChange();
}
}
//--------------------------------------------------------------------------------------------------
BLYNK_WRITE(V2)
{
if (RdyFlag == true)
{
RdyFlagStateChange();
pinValueV2 = param.asInt(); // assigning incoming value from pin V2 to a variable
terminal.print("Access Ramp: ");
terminal.flush();
RampLEDdown.setColor(LED_Red); // Set Ramp LEDs to red for travelling and unlocked
RampLEDup.setColor(LED_Red);
RampLEDdown.on();
RampLEDup.on();
// DC_loop();
if (pinValueV2 == 0)
{
audioflag = true;
my_mp3_stop();
my_mp3_play(MP3_Folder, 34);
rampTimer = timer.setTimeout(8000, rampDown);
}
else
{
audioflag = true;
my_mp3_stop();
my_mp3_play(MP3_Folder, 33);
rampTimer = timer.setTimeout(8000, rampUp);
}
terminal.flush();
}
}
//--------------------------------------------------------------------------------------------------
void rampDown()
{
rampdownflag = true;
}
//--------------------------------------------------------------------------------------------------
void rampUp()
{
rampupflag = true;
}
//--------------------------------------------------------------------------------------------------
BLYNK_WRITE(V6) // Cockpit Power On/Off
{
if (RdyFlag == true)
{
RdyFlagStateChange();
pinValueV6 = param.asInt(); // assigning incoming value from pin V6 to a variable
myDelay(10);
if (pinValueV6 == 0)
{
terminal.println("All Power Systems: OFF");
terminal.println("");
terminal.flush();
SW_LED[0] = false; // LED1 OFF
SW_LED[1] = false; // LED2 OFF
SW_LED[2] = false; // LED3 OFF
SW_LED[3] = false; // LED4 OFF
FullStripColor(0, 0, 0);
EngineRunFlag = false;
HyperdriveFlag = false;
my_mp3_stop(); // MP3 stop
MusicST = 0;
}
else
{
SW_LED[0] = true; // LED1 ON
SW_LED[1] = true; // LED2 ON
SW_LED[2] = true; // LED3 ON
SW_LED[3] = true; // LED4 ON
terminal.println("Cockpit Power: ON");
terminal.println("");
terminal.flush();
}
RdyFlagStateChange();
}
}
//--------------------------------------------------------------------------------------------------
BLYNK_WRITE(V7) // Engine Start/Stop
{
if (RdyFlag == true)
{
RdyFlagStateChange();
pinValueV7 = param.asInt(); // assigning incoming value from pin V7 to a variable
if (pinValueV6 == 0)
{
terminal.println("Engage main cockpit power.");
terminal.println("");
terminal.flush();
EngineRunFlag = false;
myDelay(100);
pinValueV7 = 0;
Blynk.virtualWrite(V7 , 0);
myDelay(100);
}
else
{
if (pinValueV7 == 1)
{
my_mp3_stop();
terminal.println("Engine start sequence initiated...");
terminal.println("");
terminal.flush();
if (random(100) > 70) {
my_mp3_play(1, 4);
stall(26, 1);
myDelay(1000);
pinValueV7 = 0;
Blynk.virtualWrite(V7 , 0);
FullStripColor(0, 0, 0);
terminal.println("Engine start failure.");
terminal.println("");
terminal.flush();
EngineRunFlag = false;
myDelay(100);
FullStripColor(0, 0, 0);
if (random(10) > 4)
{
terminal.println("Stall Voice Comment");
terminal.println("");
terminal.flush();
EngineRunFlag = false;
my_mp3_play(1, 32);
}
}
else
{
my_mp3_play(1, 3);
myDelay(3000);
stall(10, 1);
FullStripColor(0, 0, 255);
terminal.println("Engines: ON");
terminal.println("");
terminal.flush();
EngineRunFlag = true;
}
}
else
{
my_mp3_stop();
FullStripColor(0, 0, 0);
terminal.println("Engines: Shut Down");
terminal.println();
terminal.flush();
EngineRunFlag = false;
}
}
RdyFlagStateChange();
}
}
//--------------------------------------------------------------------------------------------------
BLYNK_WRITE(V8) // Hyperdrive On/Off
{
if (RdyFlag == true)
{
RdyFlagStateChange();
pinValueV8 = param.asInt(); // assigning incoming value from pin V8 to a variable
if (pinValueV7 == 0)
{
terminal.println("Hyperdrive failure: Engage primary engine drive.");
terminal.println("");
terminal.flush();
pinValueV8 = 0;
Blynk.virtualWrite(V8 , 0);
RdyFlagStateChange();
}
else
{
if (pinValueV8 == 0)
{
terminal.println("Hyperdrive jump complete.");
terminal.println("");
terminal.flush();
FullStripColor(0, 0, 255);
RdyFlagStateChange();
}
else
{
EngineRunFlag = false;
my_mp3_stop();
terminal.println("Hyperdrive co-ords plotted, jumping in 3...2...1..");
terminal.println("");
terminal.flush();
my_mp3_play(MP3_Folder, 6);
for ( int i = 0; i < 35; i++ )
{
FullStripColor(0, 0, 255);
myDelay(20 + i * 2);
FullStripColor(255, 255, 255);
myDelay(20 + i);
}
hyperdriveTimer = timer.setTimeout(6000, hyperdrive);
}
}
}
}
//--------------------------------------------------------------------------------------------------
void hyperdrive()
{
HyperdriveFlag = true;
}
//--------------------------------------------------------------------------------------------------
BLYNK_WRITE(V9)
{
if (RdyFlag == true)
{
RdyFlagStateChange();
pinValueV9 = param.asInt(); // assigning incoming value from pin V9 to a variable
if (pinValueV6 == 0)
{
terminal.println("Engage main cockpit power.");
terminal.println("");
terminal.flush();
}
else
{
if (pinValueV9 == 1)
{
audioflag = true;
my_mp3_stop();
terminal.println("Firing.");
terminal.println("");
terminal.flush();
if (random(1, 3) == 1)
{
my_mp3_play(MP3_Folder, 13);
digitalWrite(43, HIGH);
digitalWrite(44, LOW);
cannonTimer = timer.setTimer(70, cannon1, 6);
}
else
{
cannonTimer = timer.setTimer(70, cannon2, 3);
}
}
}
}
}
//--------------------------------------------------------------------------------------------------
void cannon1()
{
digitalWrite(43, LOW);
digitalWrite(44, HIGH);
myDelay(70);
digitalWrite(43, HIGH);
digitalWrite(44, LOW);
myDelay(70);
cannonCount++;
if (cannonCount == 6)
{
digitalWrite(43, LOW);
digitalWrite(44, LOW);
GunVoice++;
if (GunVoice > 8)
{
GunVoice = 1;
}
my_mp3_stop();
my_mp3_play(MP3_Folder, 13 + GunVoice);
cannonTimer = timer.setTimeout(4000, cannonEnd);
}
}
//--------------------------------------------------------------------------------------------------
void cannon2()
{
my_mp3_play(MP3_Folder, 35);
digitalWrite(43, HIGH);
digitalWrite(44, LOW);
cannonTimer = timer.setTimeout(100, cannon2a);
}
void cannon2a()
{
digitalWrite(43, LOW);
cannonTimer = timer.setTimeout(600, cannon2b);
}
void cannon2b()
{
my_mp3_play(MP3_Folder, 35);
digitalWrite(43, LOW);
digitalWrite(44, HIGH);
cannonTimer = timer.setTimeout(100, cannon2c);
}
void cannon2c()
{
digitalWrite(44, LOW);
cannonTimer = timer.setTimeout(600, cannon2d);
}
void cannon2d()
{
cannonCount++;
if (cannonCount == 3)
{
GunVoice++;
if (GunVoice > 8)
{
GunVoice = 1;
}
// my_mp3_playend ();
my_mp3_play(MP3_Folder, 13 + GunVoice);
cannonTimer = timer.setTimeout(3000, cannonEnd);
}
}
//--------------------------------------------------------------------------------------------------
void cannonEnd()
{
cannonFlag = true;
}
//--------------------------------------------------------------------------------------------------
BLYNK_WRITE(V10)
{
if (RdyFlag == true)
{
RdyFlagStateChange();
pinValueV10 = param.asInt(); // assigning incoming value from pin V10 to a variable
if (pinValueV6 == 0)
{
terminal.println("Engage main cockpit power.");
terminal.println("");
pinValueV10 = 0;
Blynk.virtualWrite(V10 , 0);
} else {
if (pinValueV10 == 0)
{
terminal.println("Headlights: OFF");
terminal.println("");
} else {
terminal.println("Headlights: ON");
terminal.println("");
}
}
terminal.flush();
RdyFlagStateChange();
}
}
//--------------------------------------------------------------------------------------------------
BLYNK_WRITE(V11)
{
if (RdyFlag == true)
{
RdyFlagStateChange();
pinValueV11 = param.asInt(); // assigning incoming value from pin V11 to a variable
if (pinValueV6 == 0)
{
terminal.println("Engage main cockpit power.");
terminal.println("");
pinValueV11 = 0;
Blynk.virtualWrite(V11 , 0);
} else {
if (pinValueV11 == 0)
{
digitalWrite(36, LOW); // Holoboard Off
digitalWrite(37, LOW); // Inspection pit Off
digitalWrite(38, LOW); // Bed lights Off
digitalWrite(39, LOW); // Passage 1 Floor Lights Off
digitalWrite(40, LOW); // Passage 1 Wall Lights Off
digitalWrite(41, LOW); // Passage 2 Floor Lights Off
digitalWrite(42, LOW); // Passage 2 Wall Lights Off
terminal.println("Hold Power: OFF");
terminal.println("");
} else {
digitalWrite(36, HIGH); // Holoboard On
digitalWrite(37, HIGH); // Inspection pit On
digitalWrite(38, HIGH); // Bed lights On
digitalWrite(39, HIGH); // Passage 1 Floor Lights On
digitalWrite(40, HIGH); // Passage 1 Wall Lights On
digitalWrite(41, HIGH); // Passage 2 Floor Lights On
digitalWrite(42, HIGH); // Passage 2 Wall Lights On
terminal.println("Hold Power: ON");
terminal.println("");
}
}
terminal.flush();
RdyFlagStateChange();
}
}
//--------------------------------------------------------------------------------------------------
BLYNK_WRITE(V12)
{
if (RdyFlag == true)
{
RdyFlagStateChange();
pinValueV12 = param.asInt(); // assigning incoming value from pin V12 to a variable
if (pinValueV6 == 0)
{
terminal.println("Engage main cockpit power.");
terminal.println("");
pinValueV12 = 0;
Blynk.virtualWrite(V12 , 0);
} else {
if (pinValueV12 == 0)
{
terminal.println("Landing Lights: OFF");
terminal.println("");
digitalWrite(48, LOW);
} else {
terminal.println("Landing Lights: ON");
terminal.println("");
digitalWrite(48, HIGH);
}
}
terminal.flush();
RdyFlagStateChange();
}
}
//--------------------------------------------------------------------------------------------------
BLYNK_WRITE(V13)
{
if (RdyFlag == true)
{
RdyFlagStateChange();
pinValueV13 = param.asInt(); // assigning incoming value from pin V13 to a variable
if (pinValueV6 == 0)
{
terminal.println("Engage main cockpit power.");
terminal.println("");
pinValueV13 = 0;
Blynk.virtualWrite(V13 , 0);
} else {
if (pinValueV13 == 0)
{
terminal.println("Anti-Coll Lights: OFF");
terminal.println("");
digitalWrite(49, LOW);
} else {
terminal.println("Anti-Coll Lights: ON");
terminal.println("");
digitalWrite(49, HIGH);
}
}
terminal.flush();
RdyFlagStateChange();
}
}
//--------------------------------------------------------------------------------------------------
BLYNK_WRITE(V14)
{
if (RdyFlag == true)
{
RdyFlagStateChange();
pinValueV14 = param.asInt(); // assigning incoming value from pin V2 to a variable
if (pinValueV14 == 1)
{
audioflag = true;
my_mp3_stop();
randomChatter = random(22, 33);
my_mp3_play(MP3_Folder, randomChatter); // MUSIC ON
chatterTimer = timer.setTimeout(6000, chatterEnd);
}
}
}
//--------------------------------------------------------------------------------------------------
void chatterEnd()
{
chatterFlag = true;
}
//--------------------------------------------------------------------------------------------------
BLYNK_WRITE(V16)
{
if (RdyFlag == true)
{
RdyFlagStateChange();
pinValueV16 = param.asInt(); // assigning incoming value from pin V2 to a variable
if (pinValueV16 == 0)
{
terminal.println("Music: OFF");
terminal.println("");
terminal.flush();
audioflag = false;
}
else
{
audioflag = true;
my_mp3_stop();
terminal.println("Now Playing:");
terminal.println(MusicName[pinValueV16]);
terminal.println("");
terminal.flush();
}
my_mp3_play(MP3_Folder, MusicID[pinValueV16]); // MUSIC ON
RdyFlagStateChange();
}
}
//--------------------------------------------------------------------------------------------------
void myDelay(int milli)
{
int end_time;
for (end_time = 1; end_time != milli; end_time++)
{
delay(1);
if (end_time % 100 == 0)
{
// Blynk.run();
yield();
}
}
}
// ------------------------------------------------------------------------------------------------------------ //
// ----------------------------- Functions to be processed at timer interrupt --------------------------------- //
// ------------------------------------------------------------------------------------------------------------ //
void flash()
{
static long OLD_Vale = 3;
long LED_Vale = 0;
for ( int i = 0; i < RandomLEDs; i++ )
{
if (SW_VAL1[i] > 0) { // LED flashing processing
SW_CNT[i]--;
if (SW_On[i] == 1) // LED is on
{
if (SW_CNT[i] <= 0)
{ SW_On[i] = 0;
SW_CNT[i] = SW_VAL2[i] + random(SW_RAN2[i]);
}
} else { // LED is off
if (SW_CNT[i] <= 0)
{ SW_On[i] = 1;
SW_CNT[i] = SW_VAL1[i] + random(SW_RAN1[i]);
}
}
} else {
SW_On[i] = 1; // LED steady light
}
if (SW_LED[i] == true && SW_On[i] == 1)
{
digitalWrite(StartPIN + i, HIGH); //LED lit
} else {
digitalWrite(StartPIN + i, LOW);
} //LED off
}
}
//-------------------------------------------------------------------------------------------------------------
//-------------------------------------------------------------------------------------------------------------
//-------------------------------------------------------------------------------------------------------------
void stall(int L, boolean P) // Cockpit LED flashing processing to match power stall
{
for ( int i = 0; i < L; i++ )
{
FullStripColor(0, 0, 255);
myDelay(70 + i);
if (P == 1) {
FullStripColor(0, 0, 0);
}
myDelay(70 + (i * 2));
FullStripColor(0, 0, 0);
}
FullStripColor(0, 0, 0);
}
//-------------------------------------------------------------------------------------------------------------
void CheckEngines()
{
if (EngineRunFlag == true)
{
if (digitalRead(Busy_PIN) == HIGH)
{
if (audioflag == false)
{
my_mp3_play(MP3_Folder, 5); // Engine sound if engines on
}
}
PixelRan1 = random(NUMPIXELS);
PixelRan2 = random(NUMPIXELS);
PixelRan3 = random(NUMPIXELS);
PixelRan4 = random(NUMPIXELS);
PixelRan5 = random(NUMPIXELS);
setPixel(PrevPixelRan1, 0, 0, 255);
setPixel(PrevPixelRan2, 0, 0, 255);
setPixel(PrevPixelRan3, 0, 0, 255);
setPixel(PrevPixelRan4, 0, 0, 255);
setPixel(PrevPixelRan5, 0, 0, 255);
setPixel(PixelRan1, 0, 0, 0);
setPixel(PixelRan2, 0, 0, 0);
setPixel(PixelRan3, 0, 0, 0);
setPixel(PixelRan4, 0, 0, 0);
setPixel(PixelRan5, 0, 0, 0);
PrevPixelRan1 = PixelRan1;
PrevPixelRan2 = PixelRan2;
PrevPixelRan3 = PixelRan3;
PrevPixelRan4 = PixelRan4;
PrevPixelRan5 = PixelRan5;
FastLED.show();
}
}
//-------------------------------------------------------------------------------------------------------------
void setPixel(int Pixel, byte red, byte green, byte blue)
{
LED_Array[Pixel].r = red;
LED_Array[Pixel].g = green;
LED_Array[Pixel].b = blue;
}
//-------------------------------------------------------------------------------------------------------------
void FullStripColor(byte red, byte green, byte blue)
{
for (int pixelcount = 0; pixelcount < (NUMPIXELS); pixelcount++)
{
setPixel(pixelcount, red, green, blue);
}
FastLED.show();
}
// ------------------------------------------------------------------------------------------------------------ //
// -------------------------------------------- MP3 Sub-routines ---------------------------------------------- //
// ------------------------------------------------------------------------------------------------------------ //
void my_mp3_playend() //MP3 Waiting for playback to finish
{
boolean play_state = digitalRead(Busy_PIN);
do {
play_state = digitalRead(Busy_PIN);
}
while (play_state == LOW);
}
//-------------------------------------------------------------------------------------------------------------
void my_mp3_play(int F, int N) //MP3 playback
{
mp3_play(N);
}
//-------------------------------------------------------------------------------------------------------------
void my_mp3_stop() //MP3 stop
{
mp3_stop();
}
//-------------------------------------------------------------------------------------------------------------
void RdyFlagStateChange()
{
if (RdyFlag == true)
{
RdyFlag = false;
Rdy1LED.off();
Rdy2LED.off();
Rdy3LED.off();
Rdy4LED.off();
}
else
{
if (RdyFlag == false)
{
RdyFlag = true;
Rdy1LED.on();
Rdy2LED.on();
Rdy3LED.on();
Rdy4LED.on();
}
}
}
//-------------------------------------------------------------------------------------------------------------
void initialisation()
{
if (DC_RO == 0)
{
RampLEDup.setColor(LED_Green);
RampLEDdown.off();
RampLEDup.on();
}
else
{
RampLEDdown.setColor(LED_Green);
RampLEDup.off();
RampLEDdown.on();
}
Blynk.virtualWrite(V6 , 0);
Blynk.virtualWrite(V7 , 0);
Blynk.virtualWrite(V8 , 0);
Blynk.virtualWrite(V9 , 0);
Blynk.virtualWrite(V10 , 0);
Blynk.virtualWrite(V11 , 0);
Blynk.virtualWrite(V12 , 0);
Blynk.virtualWrite(V13 , 0);
Blynk.virtualWrite(V14 , 0);
Blynk.virtualWrite(V16 , 0);
Rdy1LED.on();
Rdy2LED.on();
Rdy3LED.on();
Rdy4LED.on();
initialisationpass = false;
}
//-------------------------------------------------------------------------------------------------------------
void DC_loop()
{
DC_state1 = digitalRead(7);
DC_state2 = digitalRead(8);
if (DC_state1 == buttonON) {
DC_RO = 1;
}
if (DC_state2 == buttonON) {
DC_RO = 0;
}
Serial.print("DC_RO=");
Serial.println(DC_RO);
switch (DC_RO)
{
case 0:
SW_LED[29] = true;
analogWrite(DC_1A, 0); // Motor 1 forward rotation to A-1A pin
analogWrite(DC_1B, 255); // Motor 1 to A-1 B pin
// delay(500);
DC_Stop1();
analogWrite(DC_1A, 0);// Motor 1 pause
analogWrite(DC_1B, 0);
SW_LED[29] = false;
DC_RO = 1;
break;
case 1:
SW_LED[29] = true;
analogWrite(DC_1A, 255);// Motor 1 Reverse rotation to A-1A pin
analogWrite(DC_1B, 0); // Motor 1 to A-1 B pin
// delay(500);
DC_Stop2();
analogWrite(DC_1A, 0);// Motor 1 pause
analogWrite(DC_1B, 0);
DC_RO = 0;
break;
case 2:
analogWrite(DC_1A, 0); // Motor 1 forward rotation to A-1A pin
analogWrite(DC_1B, 255); // Motor 1 to A-1 B pin
// delay(500);
DC_Stop3();
analogWrite(DC_1A, 0);// Motor 1 pause
analogWrite(DC_1B, 0);
break;
}
}
//-------------------------------------------------------------------------------------------------------------
void DC_Stop1()
{
Serial.println("DC_Stop1");
boolean DC_state1 = digitalRead(SW_1A);
boolean DC_state2 = digitalRead(SW_1B);
do {
DC_state1 = digitalRead(SW_1A);
DC_state2 = digitalRead(SW_1B);
}
while (DC_state1 == buttonOFF);
Serial.print("DC_state A1=");
Serial.println(DC_state1);
Serial.print("DC_state A2=");
Serial.println(DC_state2);
}
//-------------------------------------------------------------------------------------------------------------
void DC_Stop2()
{
Serial.println("DC_Stop2");
boolean DC_state1 = digitalRead(SW_1A);
boolean DC_state2 = digitalRead(SW_1B);
do {
DC_state1 = digitalRead(SW_1A);
DC_state2 = digitalRead(SW_1B);
}
while (DC_state2 == buttonOFF);
Serial.print("DC_state A1=");
Serial.println(DC_state1);
Serial.print("DC_state A2=");
Serial.println(DC_state2);
}
//-------------------------------------------------------------------------------------------------------------
void DC_Stop3()
{
Serial.println("DC_Stop3");
boolean DC_state1 = digitalRead(SW_1A);
boolean DC_state2 = digitalRead(SW_1B);
do {
DC_state1 = digitalRead(SW_1A);
DC_state2 = digitalRead(SW_1B);
}
while (DC_state1 == buttonOFF and DC_state2 == buttonOFF);
if (DC_state1 == buttonON) {
DC_RO = 1;
}
if (DC_state2 == buttonON) {
DC_RO = 0;
}
Serial.print("DC_state A1=");
Serial.println(DC_state1);
Serial.print("DC_state A2=");
Serial.println(DC_state2);
}
//----------------------------------------------------------------------------------------------------------------
//<><><><><><><><><><><><><><><><><><><><><><> INITIAL SET UP <><><><><><><><><><><><><><><><><><><><><><><><><><>
//----------------------------------------------------------------------------------------------------------------
void setup() // Initial setup
{
//--- DC motor ---------------------------------------------------
pinMode(DC_1A, OUTPUT);
pinMode(DC_1B, OUTPUT);
analogWrite(DC_1A, 0);// Motor 1 pause
analogWrite(DC_1B, 0);
pinMode(SW_1A, INPUT_PULLUP);
DC_RO = 2;
//-----------------------------------------------------------------
FastLED.addLeds<WS2811, NeopixelPin, GRB>(LED_Array, NUMPIXELS).setCorrection( TypicalLEDStrip );
FastLED.show();
for ( int i = 0; i < 51; i++ ) // LED Pins set as Output
{
pinMode(StartPIN + i, OUTPUT);
}
Serial.begin(9600);
Serial1.begin(9600);
ESP8266_Serial.begin(ESP8266_BAUD);
Blynk.begin(auth, wifi, ssid, pass);
//MP3 Initial setting
Serial.println("INITIALISE MP3 PLAYER");
mp3_set_serial (Serial1); //set softwareSerial for DFPlayer-mini mp3 module
mp3_stop(); //MP3 stop
delay(1000); //MP3 Waiting for initial activation
mp3_set_volume(MP3_Vol); //MP3 Volume initial set
delay(200); //MP3 wait
mp3_stop(); //MP3 stop
delay(200); //MP3 wait
DC_state1 = digitalRead(7);
DC_state2 = digitalRead(8);
if (DC_state1 == buttonON) {
DC_RO = 1;
}
if (DC_state2 == buttonON) {
DC_RO = 0;
}
Serial.print("DC_state1 =");
Serial.println(DC_state1);
Serial.print("DC_state2 =");
Serial.println(DC_state2);
Serial.print("DC_RO=");
Serial.println(DC_RO);
Serial.println("START ININ END");
//my_mp3_play(MP3_Folder, 1);
timer.setInterval(10, flash);
// Timer1.initialize(10000); //Timer interrupt initialization
//Timer1.attachInterrupt(flash, 10000); //Timer interrupt setting
// timer.setInterval(80, flash);
terminal.println("F a l c o n");
terminal.println("C o n t r o l l e r");
terminal.println("v3.0 by Chip");
terminal.println("");
terminal.flush();
Serial.println("Initialisation Complete");
myDelay(100);
}
//----------------------------------------------------------------------------------------------------------------
//<><><><><><><><><><><><><><><><><><><><><><><><><><> MAIN LOOP <><><><><><><><><><><><><><><><><><><><><><><><><>
//----------------------------------------------------------------------------------------------------------------
void loop()
{
Blynk.run();
myDelay(10);
timer.run();
if (initialisationpass == true)
{
initialisation();
}
CheckEngines();
if (rampdownflag == true)
{
terminal.println("Down and Locked");
terminal.println("");
terminal.flush();
RampLEDdown.setColor(LED_Green);
RampLEDdown.on();
RampLEDup.off();
rampdownflag = false;
audioflag = false;
RdyFlagStateChange();
}
if (rampupflag == true)
{
terminal.println("Up and Locked");
terminal.println("");
terminal.flush();
RampLEDup.setColor(LED_Green);
RampLEDdown.off();
RampLEDup.on();
rampupflag = false;
audioflag = false;
RdyFlagStateChange();
}
if (HyperdriveFlag == true)
{
terminal.println("Hyperdrive jump complete.");
terminal.println("");
terminal.flush();
pinValueV8 = 0;
Blynk.virtualWrite(V8, 0);
EngineRunFlag = true;
FullStripColor(0, 0, 255);
HyperdriveFlag = false;
RdyFlagStateChange();
}
if (cannonFlag == true)
{
terminal.println("Good shooting kid.. Cannons to standby");
terminal.println("");
terminal.flush();
pinValueV9 = 0;
Blynk.virtualWrite(V9 , 0);
cannonCount = 0;
cannonFlag = false;
audioflag = false;
RdyFlagStateChange();
}
if (chatterFlag == true)
{
pinValueV14 = 0;
Blynk.virtualWrite(V14 , 0);
chatterFlag = false;
audioflag = false;
RdyFlagStateChange();
}
}
//-------------------------------------------------------------------------------------------------------------
I will get around to posting the circuit diagram at somepoint if anyone is interested.
|
|
|
Rank: Amateur level 2 Groups: Registered
Joined: 15/03/2017 Posts: 46 Points: 138 Location: Outer reaches of the galaxy .... West Midlands
|
Well the inevitable has happened (although surprised it hadn't happened earlier), I have blown my Arduino Mega whilst I was messing with my breadboard.  Replacement is on order as is an Arduino Trinket, I intend to move the engine lighting control to the Trinket and slaving it to the Mega. I had tried to reduce as many delays as possible throughout the code to prevent such things as the gun routine from affecting the engine lights flash rate. This way it will be totally unaffected.... hopefully  I have also changed it to use bluetooth 4.0 (BLE) with my phone, this way should I ever want to take the model elsewhere I'm not having to rely on a wifi connection and knowing and changing the SSID and password in the code.
|
|
|
Rank: Amateur level 2 Groups: Registered
Joined: 15/03/2017 Posts: 46 Points: 138 Location: Outer reaches of the galaxy .... West Midlands
|
Quick update ...well just because I’m chuffed .... got the arduino pro trinket working with the Mega so now the engine lights are independent of everything else I.e. cannons, ramp etc, so no more slowing down of the engine lights! Have also changed the engine start lighting routine a bit, with everything now running from a 12v 5A power source, just need to bread board up all the lights to make sure it all works including the 12V lighting lines. Hopefully will have some pics and a circuit print shortly for anyone considering anything similar.
|
|
|
Rank: Administration Groups: Registered, Administrators, Global Forum Support, Moderator, Forum Support Team, Official Builds Joined: 04/01/2016 Posts: 7,178 Points: 21,841 Location: Northamptonshire, England
|
Glad you’ve got it all sorted Chip, look forward to seeing it working. Mark. Regards
Markwarren
(Mark) Admin
|
|
|
|
Guest
|
 US
US

